












魚道設計
この記事は、シャーブルック大学 (ケベック州シャーブルック)の Jason Duguay によって寄稿されました。
北米に広がる広大な道路網において、高架式暗渠が魚類の移動を阻害するという残念な現実が存在します。高架式暗渠は、不適切な暗渠設置技術と堆積物の浸食が複合的に作用して発生します。暗渠の出口では、浸食作用によって過度に大きな浸食穴が生じ、暗渠の底面と下流の水面との間に数センチメートルから数メートルに及ぶ垂直方向の落差が生じます。このような垂直方向の障害物は、河川生息地における魚種の分布に大きな影響を与えることが知られており、小水路の生息地分断の主要な原因の一つとなっています。
本研究では、 FLOW-3D が、高架式暗渠によって生じる垂直方向の障壁を乗り越える魚道を提供することで、失われた河川魚類の生息地を回復するために使用される魚道内で使用する革新的な魚道バッフルの設計において重要な役割を果たしました。現在、当社の土木および環境分野のお客様は、このようなモデリングと分析にFLOW-3D HYDROを使用しています。この研究は、カナダのケベック州にあるシェルブルック大学の土木工学科で実施されました。 FLOW-3D HYDRO は、魚道バッフル上および魚道プール全体における流れの多数のパラメータを調査し、魚の遡上を促進するためにバッフル設計をどのように改善できるかについての知見を得るために使用されました。
バッフル設計と魚道基準

図1:波形鋼板製暗渠内に設置されたアーチ型バッフル設計のCADレンダリング画像。より大きな主通路とより小さな副通路が確認できる。
バッフルの突き出たアーチは、流量が増加すると水を保持し、プールの深さを増すように設計されています。プールの深さが増すと、式1で計算されるプールの体積散逸電力(VDP)が減少します。ここで、ρは密度、gは重力定数、Qは流量、Vはプール内の流体の体積、Δhは隣接する上流のプールの水面と問題のプールの水面との間の標高差です。

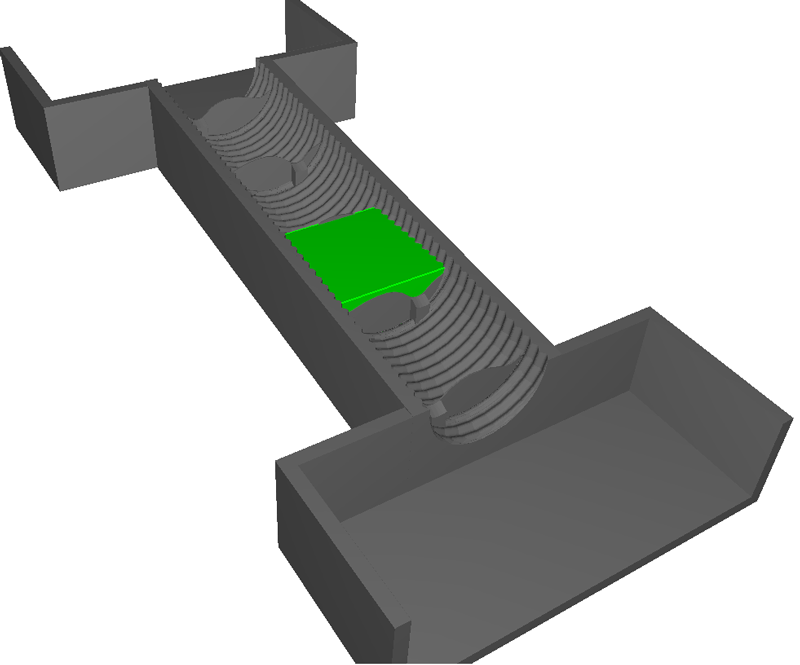
図2:シミュレーションで使用されたインポートされたCADジオメトリ、魚道の長さに沿った主要通路の千鳥配置、および体積サンプリングボックス(明るい緑色)が確認できる。
魚道設計は、アーチ型バッフルの通路部およびプール内の流速と乱流分布についても検証されました。流速が速いと魚の移動が妨げられ、乱流の激しい領域では魚の方向感覚が狂い、予測不能で急速に変化する体力にさらされるため、流れをうまく航行し、魚道をうまく登る能力に影響が出る可能性があります。
一定の距離を移動するために必要な仕事量は、魚の地面に対する速度の3乗と、魚の周囲を流れる平均流速の合計に比例します。したがって、魚道設計では、魚のエネルギー消費を減らし、通過成功の可能性を高めるために、流速を最小限に抑えることが求められます。多くの場合、設計は、特定の対象種の瞬間的(または臨界)遊泳速度を超える流速の有無について評価されます。魚の瞬間的速度は、一般的に数秒間の激しい運動の間しか維持できず、上昇を再開するには回復が必要です。北米の社会的および経済的に重要な魚種の瞬間的速度を図3に示します。

図3:北米にとって重要な数種の魚類の成魚の遊泳速度(Bell 1990のデータを基に作成)。
シミュレーションパラメータ
アーチ型バッフルを備えた魚道設計は、2つの勾配(8.5% と 10%)と2つの流量 (低流量 Q=0.062 m3/sとQ=0.150 m3/s)でシミュレーションされました。乱流運動エネルギー(TKE)の空間分布を取得するために、2方程式k–ε 乱流モデルが適用されました。バッフルは、波状深さ64 mm、頂部間の距離0.230 mの半円形波形鋼管カルバートでシミュレーションされました。5つのバッフルが10 mの長さの魚道に配置され、プール間の0.2 mを得るために互いに適切な間隔で配置されました。
ハードウェア情報
シミュレーションは、64 GBのRAMを搭載したXeon E5-1650 3.2 GHz 6コアワークステーションプロセッサ上で実行されました。領域内のセル総数は約250万個(セルサイズは0.025 m)で、20秒間の流れをシミュレーションするのに約5時間かかりました。
結果と考察
定常状態が得られた後、結果をFlowsightにインポートして後処理と流場可視化を行いました。魚道の上流端に設定した色付きの流線に沿って、速度と乱流の両方の空間分布を評価しました。速度の大きさの分布の例を図4aと4c(それぞれ低流量0.062 m³/sと高流量0.150 m³/s)に示し、TKEの空間分布を図4bと4d(それぞれ低流量と高流量)に示します。
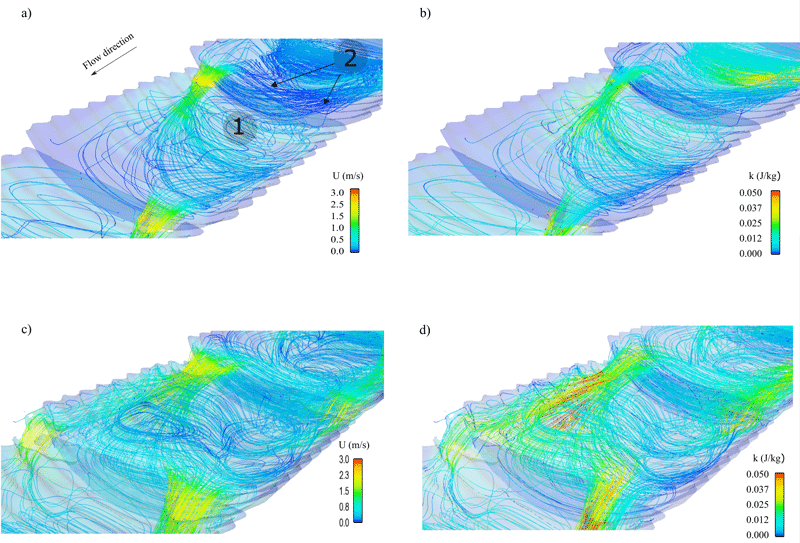
図4:魚道内の流線に沿って色分けされた速度の大きさとTKE分布:a)低流量0.062 m3/sでの速度、b)低流量でのTKE分布、c)高流量0.150 m3/sでの速度、d)高流量でのTKE。結果は、FlowSightで後処理されている。
図4aと4cの速度の大きさを図3の速度の大きさと比較すると、試験した流量では、魚道は成魚の大部分にとって速度の障壁にはならないと考えられます。図4aと4bを詳しく見ると、アーチバッフルのすぐ下流に、低速で低TKE値(プールで観測された最大TKE値約0.045 J/kgと比較して)を特徴とする大きな再循環ゾーン(ラベル1)が存在することがわかります。この再循環ゾーンの位置は、休息したり、主通路または副通路のいずれかを通って上流へジャンプする試みの準備をするのに最適であると考えられます。もう1つの持続的な低速、低乱流の休息ゾーンは、アーチバッフルのすぐ上流側の容積を占めていることがわかりました(図4aのラベル2)。このゾーンは、魚がより高速の通路を泳いだり飛び越えたりする際に、回復して方向転換するための低速ゾーンを提供すると考えられます。
高流量の場合、突出したアーチはプール容積を増加させ、VDPを許容レベルに維持するという本来の機能を果たしていることが結果から示されました。例として、Q= 0.062 m³/sのシミュレーションではVDPが60 W/m³であったのに対し、Q=0.150m³/sでは117m³/s でした。流量が140%増加したにもかかわらず、VDPは95%しか増加しませんでした。これは、プール内の乱流を低減する上で有利な設計上の特徴です。
結論
全体として、 FLOW-3D は、多数のバッフル設計の反復が魚道の流れ場に及ぼす影響を迅速に評価するための柔軟なツールであることが証明されました。 FLOW-3D のFAVORize機能により、大規模なメッシュの再作成やシミュレーションの再モデリングを行うことなく、既存のモデル内でバッフルの形状を変更し、迅速に交換することができました。この研究の結果は、アーチ型バッフルとそれに付随する魚道設計が、高架式暗渠における魚の通過を改善する上で数多くの潜在的な利点をもたらすことを示しています。近い将来、アーチ型バッフルは、数十年にわたり魚の通過が阻害されてきたカナダのオンタリオ州にある暗渠において、本稿で議論したのと同様の魚道用途で試験される予定です。
* 二重通路アーチ型バッフル形状のアイデアは、カナダのニューファンドランド州政府の生物学者であるケン・ハナフォード氏によるものとされています。
参考文献
Bell, MC (1990). 漁業工学要件および生物学的基準ハンドブック。米国陸軍工兵隊、第3版。
Larinier, M.、Porcher, J.、Travade, F.、および Gosset, C. (1994)。専門知識とフランチャイズ展開の概念を評価します。 Conseil Super´rior de la peèche。